

UAV (drone) CAN communication protocol V1.0 (for smart battery)
网络拓扑结构说明
保护板在无人机网络采用CAN互连结构,CAN总线为保护板(BMS)和飞控(FCS)之间的数据通信总线。
The protection board adopts CAN interconnection structure in the drone network, and the CANBUS is the data communication bus between the protection board (BMS) and the flight control system (FCS).

其中R为120Ω终端电阻。
The R is 120Ω terminal resistance.
CAN通讯数据格式
CAN communication data format
CAN网络信号数据格式遵守下表,双行定义遵循首行
The CAN network signal data format follows the table below, and the two-line definition follows the first line
| 数据类型 Data type |
比例因子 scaling factor |
范围(实际量程) Range (Actual Range) |
偏移量 Offset |
字节数 Bytes |
| 各 ECU 数据格式定义 Definition of the data format of each ECU |
||||
| 总电压(直流) Total voltage (DC) |
0.1V/bit | 0~1000(0~100V) | 0 | 2BYTE |
| 总电流(直流) Total current (DC) |
0.1A/bit | -3000 ~ 3425.5A | -3000A | 2BYTE |
| 单体电压 Cell voltage |
0.001V/bit | 0 ~ 65.535V | 0 | 2BYTE |
| 温度 Temperature |
1℃/bit | -40 ~ 210℃ | -40 | 1BYTE |
| 电池 Battery (SOC) |
0.1%/bit | 0~1000(0~100%) | 0 | 2BYTE |
| 累计充入容量 Cumulative charging capacity |
0.001AH/bit | 0 ~ 4211081AH | 0 | 4BYTE |
通信规范
Communication specification
3.1 数据链路层应遵循的原则
Principles to be followed at the data link layer
总线通讯速率为:500Kbps,数据链路层的规定主要参考CAN2.0B和SAE J1939的相关规定。
The bus communication rate is 500Kbps. The regulations of the data link layer mainly refer to the relevant regulations of CAN2.0B and SAE J1939.(smart battery)
使用CAN扩展帧的29位标识符并进行了重新定义,以下为29位标识符的分配表:
The 29-bit identifier of the CAN extended frame is used and redefined.
The following is the allocation table of the 29-bit identifier:
| IDENTIFIER 11BITS | SRR | IDE | ||||||||||
| PRIORITY | R | DP | PDU FORMAT(PF) | SRR | IDE | |||||||
| 3 | 2 | 1 | 1 | 1 | 8 | 7 | 6 | 5 | 4 | 3 | ||
| 28 | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | 19 | 18 |
| IDENTIFIER EXTENSION 18BITS | |||||||||||||||||
| PF | PDU SPECIFIC(PS) | SOURCE ADDRESS(SA) | |||||||||||||||
| 2 | 1 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 |
| 17 | 16 | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
其中,优先级为3位,可以有8个优先级,R一般固定为0,DP现固定为0,8位的PF为报文的代码,8位的PS为目标地址或组扩展,8位的SA为发送此报文的源地址。
Among them, the priority is 3 bits, there can be 8 priority levels, R is generally fixed to 0, DP is now fixed to 0, 8-bit PF is the message code, 8-bit PS is the target address or group extension, 8-bit SA is the source address to send this packet.
接入网络的每一个节点都有PGN和地址,PGN用于识别节点的功能和进行地址仲裁,地址用于节点的数据通信。
Each node in the access network has a PGN and an address. The PGN is used to identify the function of the node and perform address arbitration. The address is used for data communication of the node.
每个节点都至少有一种功能,可能会有多个节点具有相同的功能,也可能一个节点具有多个功能。
However, Each node has at least one function, and multiple nodes may have the same function, or a node may have multiple functions.
对于多字节数据,采用小端方式,如4660=0x1234,首先发送 0x34, 再发送 0x12。
For multi-byte data, use the little-endian method, such as 4660=0x1234, send 0x34 first, then send 0x12.
3.2 CAN网络地址分配表
CAN network address allocation table
| 结点名称地址Node name address | 地址 SOURCE ADDRESS(SA) |
| 保护板(BMS) | 240 (0xF0) |
| 飞行控制系统(FCS) | 10 (0x0A) |
3.3 整机网络通讯硬件要求
Hardware requirements for network communication
- BMS网络系统的CAN在物理上与电池组不隔离的;
The CAN of the BMS network system is not physically isolated from the battery pack.
- 网络系统支持热拔插, 电源应具有反接保护和掉电检测功能;
The network system supports hot-swap, the power supply should have reverse connection protection and power failure detection function. (smart battery)
- CAN总线的通信电缆采用双绞线;
The communication cable of the CAN bus uses twisted pair.
- CAN总线上最远两端部件要有终端电阻(120Ω);
The farthest parts on the CAN bus must have termination resistance (120Ω).
- CAN通信电缆应尽最离开动力线。
The CAN communication cable should do its best to leave the power line.
BMS 发送 Sending
4.1 BMS 发 FCS 报文 1 / BMS send FCS message 1

4.2 BMS 发 FCS 报文 2 / BMS send FCS message 2

4.3 BMS 发 FCS 报文 3 / BMS send FCS message 3

4.4 BMS 发 FCS 报文 4 / BMS send FCS message 4
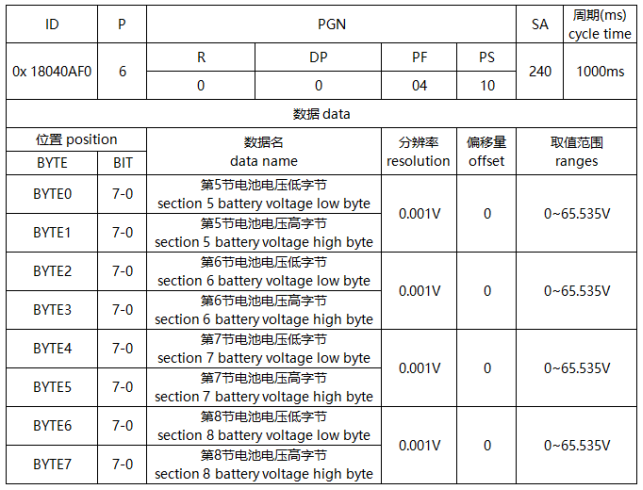
4.5 BMS 发 FCS 报文 5 / BMS send FCS message 5

4.6 BMS 发 FCS 报文 6 / BMS send FCS message 6
